什么是具身空间?如何建模?
按 V0.2 工作定义:具身空间 ES 是面向特定主体与任务的任务执行域——把任务判定所需的异质状态、观测、动作、可供关系、动力学与约束组织起来,据此计算允许、安全和可到达的行为。“空间”是领域组织术语;数学承重点在各状态分量各自合适的数学结构和其上的可行集/安全集/可达集。
本页历史版本曾以”三流形乘积 “为核心定义,该表述已废止(乘积不产生耦合;语义与数据不满足流形条件),见修订说明。下文例子中的配置流形数学本身没有变——它一直是恰当的,被撤回的只是”三者都是流形且相乘即统一”的主张。
传统框架的两个局限
经典机器人控制用两个空间描述系统状态:关节空间记录关节角 ;任务空间记录末端位姿 ;两者通过正运动学 相连。这在任务确定、环境固定的经典工业机器人上够用。
加入大模型和自然语言任务描述后,问题出现了。LLM 的输出是语义层面的——“换一下 3 号防振锤”——它不存在于 里。物理控制器只接受力矩/速度指令,不理解语义。两个系统之间没有共同的形式化状态描述,也就无法建立可验证的接口。
第二个局限更隐蔽:关节空间 是平坦的,但关节角是周期性的, 和 是同一个物理状态。用欧氏距离衡量关节角距离会产生系统性误差。
V0.2 建模:异质状态空间
不同性质的状态用各自合适的数学描述,先验联合域为:
| 分量 | 数学结构 | 本例中的形态 |
|---|---|---|
| 物理域 | 配置流形、SE(3)、ODE——这部分用流形是恰当的 | 双旋转关节 → 环面 |
| 任务域 | 自动机 / 任务网络(离散图,不是流形) | Approach → Grasp → Lift → Place 有向图 |
| 信息域 | 感知潜空间、信念状态 | 神经编码器输出的潜空间 |
| 规范域 | 规则、时序逻辑、许可状态 | 作业许可与安全距离约束 |
关键修订:乘积只是联合,不产生耦合。真正承重的是 上由约束经三值合取确定的可行集 、安全集与可达集——“机械臂能做什么”由它们回答,不由联合空间本身回答。
简单例子:二自由度平面机械臂
取臂长 m, m,两个旋转关节。以下三张图全部关于 的配置流形——成熟微分几何的直接应用。
图1:配置空间与任务可达集
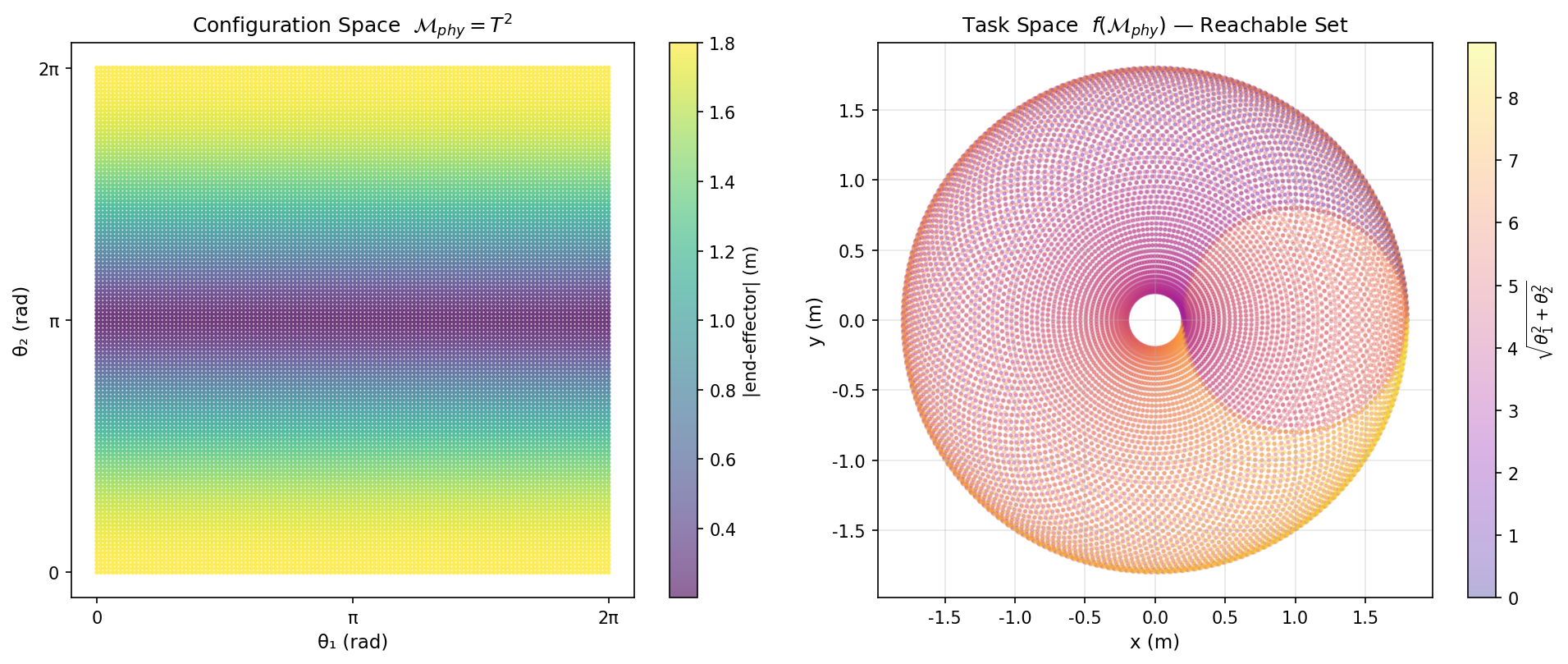
左图: 展开为正方形,每点是一组关节角 ,颜色为末端到原点距离。左右两边( 与 )物理上是同一点——环面拓扑在平坦欧氏空间中无法正确体现。
右图:正运动学 映射到末端可达集。同一末端位置可由多组关节角到达(运动学冗余)。
图2:欧氏距离 vs 测地距离
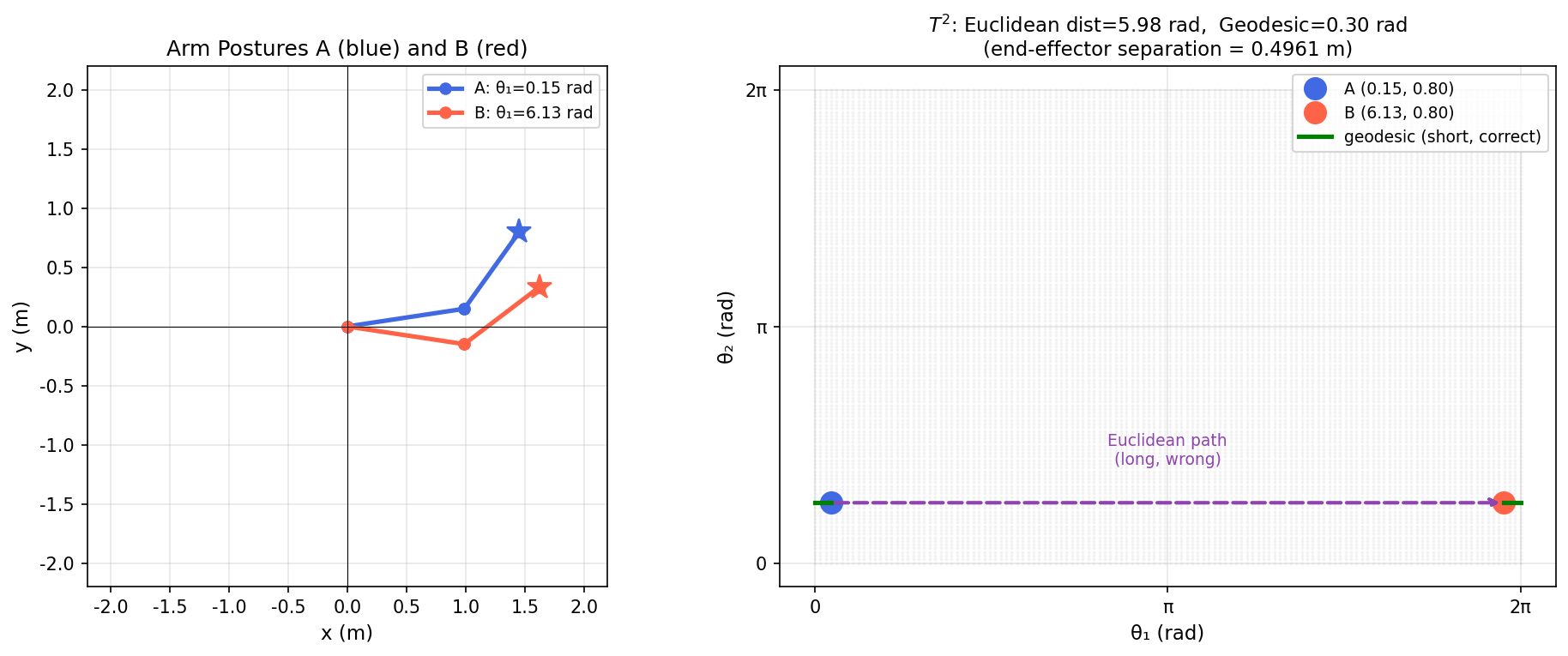
取 与 (rad)两个配置:末端执行器几乎重合(左图),但展开配置空间中的欧氏距离约 6.08 rad,沿环面绕行的测地距离仅约 0.2 rad(右图)。用欧氏距离设计的控制律会”绕远路”——安全控制中不可接受。 上的黎曼测地距离才是正确度量。
图3:黎曼度量的分布
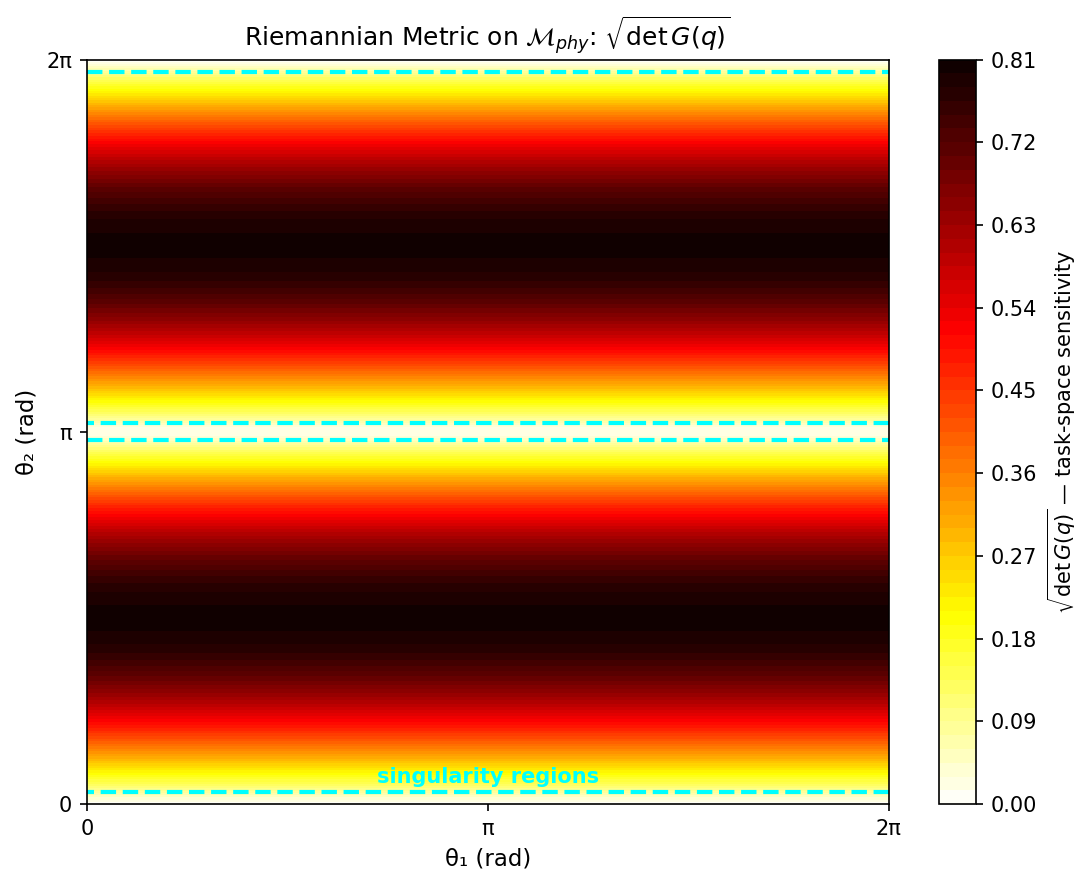
度量由正运动学雅可比诱导:。热图为 的分布:深色区域关节速度有效传导到末端; 的奇异区域末端速度趋零,失去可操控性。安全集设计需在配置空间回避奇异区域,而不只在笛卡尔空间查碰撞。
图4:三个异质分量(历史图注修订)
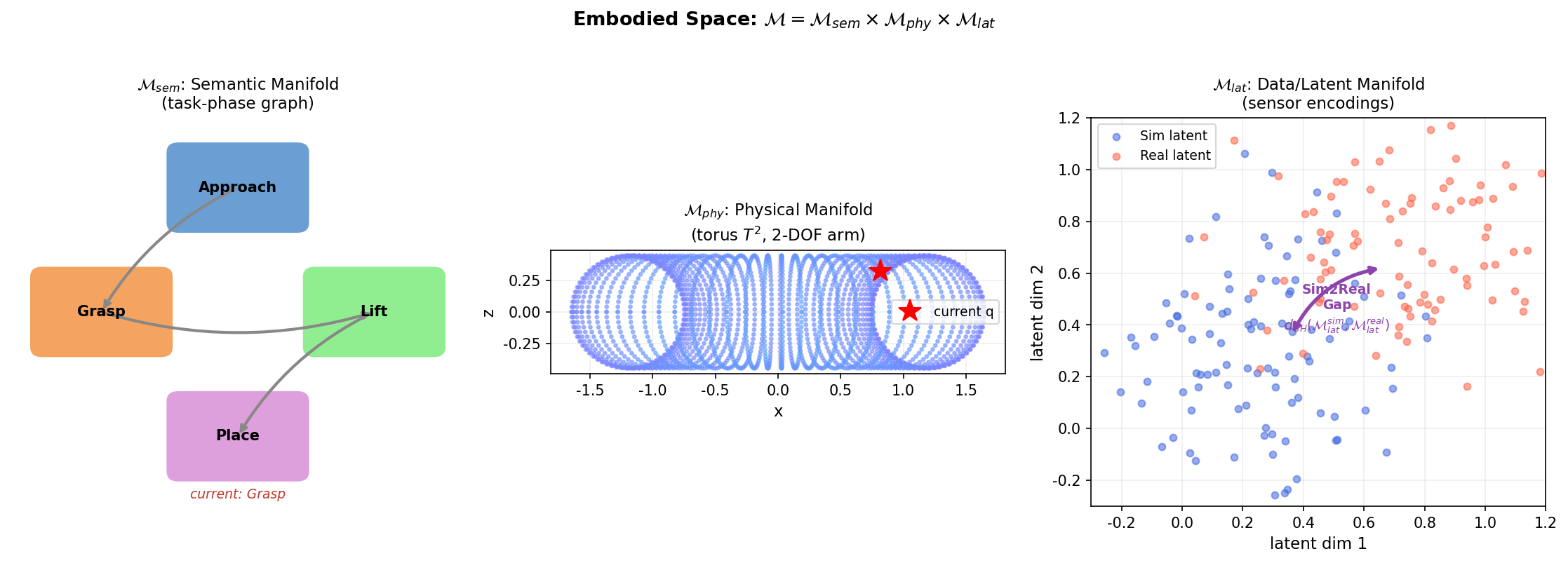
此图历史标题为”三流形乘积结构”,现按 V0.2 重新解读为三个异质分量并列——它们性质不同,恰恰不能都叫流形:
左: 是有向图(不是流形),节点为任务阶段,当前状态 Grasp。HTN 在任务模型中搜索合法序列。
中: 的环面结构,红星为当前配置。安全控制在此域上定义安全集并实时校验。
右:感知潜空间 ( 的一部分)。仿真数据(蓝)与真实数据(红)落在不同区域,两者的 Gromov-Hausdorff 距离可作 Sim2Real 差距的一种度量——潜空间几何分析采用表示学习既有方法,注明来源谱系,不作原创主张。
与 EICPS 架构的对应
完整状态 分属任务域、物理域与信息域。Brain 在任务模型上规划(非实时)、合规门控依 校验许可、安全内核在 上维持安全集(硬实时)——各层消费不同分量,通过三值门控与签署产物衔接,而不是共享一个”统一几何空间”。ES 的价值是把这些异质分量组织成可判定 的任务执行域。
→ 从 EST 到 ES:概念演进 · 具身空间 ES 完整定义 · 三值门控 · 数学讲义·流形是什么